Ich werde hier in aller kürze grob auf die Bestandteile des Schaltplanes eingehen. Hierzu betrachten wir immer die Verwendeten Bausteine sowie die peripher dazgehörenden Bauteile. Die Schaltungen sind größten Teils den Datenblättern entnommen, von mir hinzugefügte Bauteile erkläre ich selbstverständlich auch.
WICHTIG: Zur beschreibung schaut man sich immer den Schaltplan mit an. Damit man das erklärte besser nachvollziehen kann.
L298P - Motortreiber mit peripherie
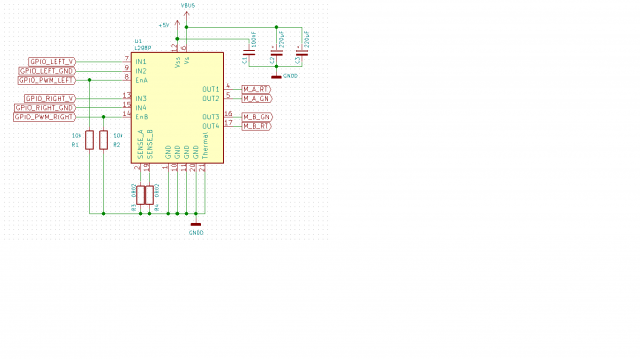
In diesem Auszug der Schaltplanes ist das Herzstück der Motoransteuerung, der Treiber zu sehen. Um ihn herum nur eine geringe Anzahl an Bauteilen.
R1 und R2 dienen als Pull-Down um das Enable Signal beim anschließen der Stromversorgung definiert auf Masse zu ziehen und ein ungewolltes Anlaufen der Motoren zu verhindern, was bei einem unserer Prototypen tatsächlich der Fall war.
R3 und R4 dienen zur Strommessung. Da dieser beiden Widerstände mit 20mOhm verschwindend gering sind fällt hier nur eine geringe Spannung ab. Diesen Spannungsabfall können wir abgreifen und im Mikrocontroller respektive RaspberryPi anhand der Formel I=U/R in den aktuell fließenden Strom umwandeln. Dies wird teil eines späteren updates sein.
C1, C2 und C3 dienen dazu um Störungen abzufangen und Spannungseinbrüche beim Schalten der Motoren abzufangen. Da ein Elektromotor im ersten moment einen Kurzschluss darstellt wird die Stromversorgung einen Bruchteil einer Sekunde stark belastet. Da diese so schnell nicht reagieren kann bedient man sich Kondensatoren, die einen viel kleineren Innenwiderstand haben. Daraus resultiert das die Energie aus den Kondensatoren schneller entnommen werden kann.

Dies ist die Ausgangsschaltung für den Motortreiber.
D1 bis D8 sind als Freilaufdioden gedacht. Schaltet man eine Induktivität schlagartig ab wird eine Spannung induziert die ihrer Ursache entgegenwirkt (stichwort Lenz´sche regel). Diese Spannung kann gut und gerne mehrere Hundert Volt annehmen. Diese induzierte Spannung wäre in der Lage unsere Schaltung zu zerstören. Aus diesem Grund werden die Dioden eingesetzt um es zu ermöglichen die Spannung definiert abzubauen, genauer gesagt baut sich diese Spannug im idealfall schon garnicht auf bzw. der effekt wird stark abgeschwächt, je nachdem wie schnell die Dioden sind.
J1 und J2 sind die Anschlüsse für die Elektromotoren. Kabel rein, zuschrauben, gut is. Noch fragen?!

Umschaltung der Spannungsversorgung
Rechts ist die Schaltung für die automatische Umschaltung der Spannungsversorgung.
Standandardmäßig, wenn SW1 geöffnet ist und U5 nicht beschaltet, ist Q3 durchgeschaltet und Versorgt den Robot mit Spannung aus dem Akku. R24 Dient hierbei als Pulldown um das Gate des MOS-FET auf Masse zu ziehen und diesen stets durchgeschaltet zu lassen.
Wird nun SW1 geschlossen liegt das Gate auf dem Potential von UBatt. Da die Spannung zwischen Gate und Source jetzt 0V ist, ist dieser gesperrt. Dadurch ist die Schaltung auch während der Akku angeschlossen ist nicht mit diesem Verbunden.
Dies passiert auch wenn das Netzteil mit 15V angeschlossen wird. Hierbei schließt jedoch U5 und nicht SW1 das Gate und Source von Q3 kurz. R23 ist lediglich der Vorwiderstand der internen LED von U5 um den Strom zu begrenzen.
Während das Netzteil angeschlossen ist wird Q2 leitend und versorgt die Schaltung als auch das Ladegerät mit Spannung. Das geschieht weil U6:3/4 leitend wird. Der Widerstand R25 dient dazu um Source und Gate von Q2 auf das selbe Spannungslevel zu bringen. Durch das geschaltete Opto-MOS Relais wird das Gate auf Masse gelegt und Q2 leitend. Durch R25 wird jetzt verhindert das es einen Kurzschluss von 15V auf Masse über U6 gibt. R22 ist wie bei U5 der Vorwiderstand für die Interne Diode.
D15 und D16 sind lediglich als sicherheit das kein Strom durch die Bodydiode von Q2 oder Q3 fließen kann. WICHTIG: Keine Schottkydiode verwenden! Der Reverse Strom ist hier so hoch, das eine Spannung am Drain der MOS-FET anliegt.

Das Schaltnetzteil
Das Schaltnetzteil mit dem LM2596 als treibende Kraft benötigt nur wenige externe Bauteile.
C4 am Eingang dient zur Stabilisierung der Eingangsspannung.
Durch den Spannungsteiler R12 und R13 wird die Feedbackspannung für die konstante Ausgangsspannung von 5,1 Volt für das Raspberry Pi eingestellt.
L1 speichert Energie und baut diese ab während der Leistungstransistor im LM2596 gesperrt ist.
Der Abbau der in L1 gespeicherten Energie geschieht über D13. Somit ist ein kontinuierlicher Stromfluss zu jeder Zeit durch die Verbraucher gewährleistet, man spricht hier auch von einem Durchflusswandler.
C10 in Verbindung mit L1 ist ein Tiefpass zweiter Ordnung. Dieser Filtert den Gleichanteil aus dem Rechtecksignal heraus. Wie hoch dieser Anteil ist kann über das Tastverhältnis eingestellt werden.
Das Netzteil schafft 3 Ampere am Ausgang und reicht für unsere bedürfnisse locker aus.

Das Ladegerät
Das Ladegerät arbeitet mit dem LTC4010 hochintegriert, sodass nur noch ein Dual-Mosfet für den Strom und ein paar wenige Bauteile als Peripherie notwendig sind. Durch den externen Dual-Mosfet, die Induktivität und die Diode arbeitet dieses Ladegerät tatsächlich als DC/DC Wandler, was einen Wirkungsgrad des Ladegerätes von ca. 90% und mehr möglich macht.
D11 am /FAULT anschluss zeigt an wenn sich zum Beispiel die Falsche Zellenanzahl oder defekte Zellen am Ausgang befinden. D10 an /CHRG zeigt an wenn geladen wird.
D9 dient lediglich als Zustandsanzeige ob das Netzteil angeschlossen ist.
Der Anschluss CHEM dient dazu die Akku art auszuwählen. Wird der Pin direkt auf Masse gelegt, werden die Ladeparameter für NIMH akkus ausgewählt. Liegt eine Spannung größer als 2,85V an, wird mit den Parametern für NICD Akkus geladen.
Der Anschluss GND wird einfach auf GND gelegt. VTEMP kann mit einem 10k NTC versehen werden um die Akku Temperatur zu überwachen. Wird der Pin direkt auf GND gelegt, pausiert das Laden. Wenn man keine Temperaturüberwachung nutzen möchte sollte der Pin über einen 10k Widerstand auf Masse gelegt werden.
Über einen externen Spannungsteiler (R8 und R11) wird an VCELL die durchschnittliche Einzelzellenspannung eingestellt. Das Verhältnis von R11 zu R8 sollte dem Faktor "n-1" entsprechen, wobei n der Anzahl in Serie geschalteter Zellen entspricht. R8 soll im Bereich von 1k bis 100k liegen.
VCDIV verbindet den Spannnungteiler mit GND wenn geladen wird. Dieser eingang ist ein open-drain Eingang der von GND bis UBat beschaltet werden kann.
Mit R10 am TIMER Pin kann die maximale Ladezykluszeit eingestellt werden.
Mit einem externen Widerstand zwischen SENSE und BAT wird der Ladestrom eingestellt. Dieser wird mit der Formel RSENSE=100mV/IPROG berechnet. IPROG ist hierbei der gewünschte Ladestrom.
Über den Pin BAT liegt die Batteriespannung an. Er wird dazu benutzt um den Ladestrom von VCC an die Batterie zu überwachen.
INTVdd wird über einen Keramikkondensator, welcher mindestens 100nF haben sollte, auf Masse gelegt.
BGate steht für BOTTOM GATE und steht für das Gate, den Steueranschluss, des N-Kanal MOSFET des FDS8858CZ.
PGND steht für Power Ground und schaltet Ströme der internen Schaltkreise des LTC gegen Masse.
TGATE steht für TOP GATE. Es steuert den Gate-Anschluss des oberen MOSFET welcher der P-Kanal MOSFET des FDS8858CZ ist.
An VCC wird die Versorgungsspannung über eine Diode angelegt. Die Maximale eingangsspannung darf laut Datenblatt 34V betragen.
/READY ist ein open-drain Ausgang nach Masse welcher durch eine LED anzeigt ob alle zum Betrieb notwendigen Spannungen vorhanden sind. Wenn man diesen Pin nicht verbinden möchte, sollte man ihn mit keiner Leiterbahn, also floating, lassen.
THERMAL ist die Kühlfläche an der Unterseite des LTC4010. Diese sollte für die maximale performance mit Ground verlötet werden. Somit ist die beste Kühlung des IC gewährleistet.
Sonstige Schaltungen
Der Rest der Schaltung sind lediglich sämtliche Steckverbinder, zwei Spannungsteiler für die Ultraschall Abstandsensoren und ein N-Kanal Mosfet welcher durch den entsprechenden Raspi-Pin die Laserdiode schaltet. Diese sind in Blatt 2 im Downloadbereich zu sehen.